 Latest images
Latest images
讀取使用 ADXL345 的三軸加速度,以及轉換成俯仰 (pitch) 和翻滾 (roll) 的角度
此為 LinkIt 7697 BlocklyDuino v3 新功能, 預計於七月初發佈
電路圖
LinkIt 7697
ADXL345 模塊
麵包板
杜邦線
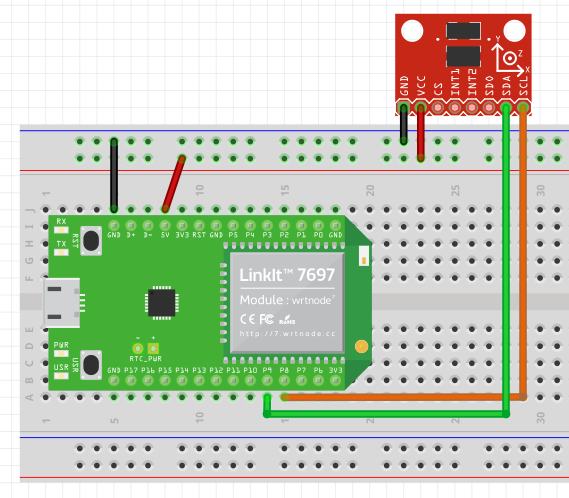
使用 ADXL345 模組,搭配下面範例需連接以下腳位
VCC : 外接 5V 電源供應 (ADXL345 模組通常工作電壓為 3V~5V,所以也可使用 3V3 供應電源)
GND : 外接 GND
SDA :接到 P9 (LinkIt 7697 的 I2C-DATA 資料腳位)
SCL 或 SCK: 接到 P8 (LinkIt 7697 的 I2C-CLK 時序腳位)

積木畫布
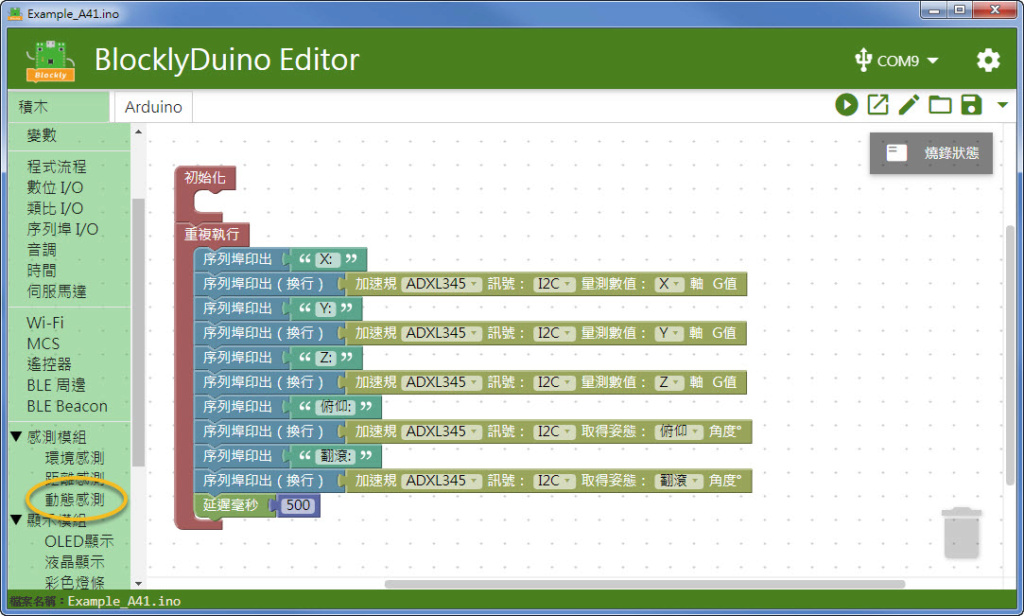
產生的 Arduino 程式如下
#include <Wire.h>
#include <adxl345_blockly.h>
ADXL345Block adxl345;
void setup()
{
Serial.begin(9600);
adxl345.begin();
}
void loop()
{
Serial.print("X: ");
Serial.println(adxl345.getX());
Serial.print("Y:");
Serial.println(adxl345.getY());
Serial.print("Z:");
Serial.println(adxl345.getZ());
Serial.print("俯仰:");
Serial.println(adxl345.getPitch());
Serial.print("翻滾:");
Serial.println(adxl345.getRoll());
delay(500);
}
序列埠監控視窗三軸的加速度值,以及俯仰和翻滾的角度
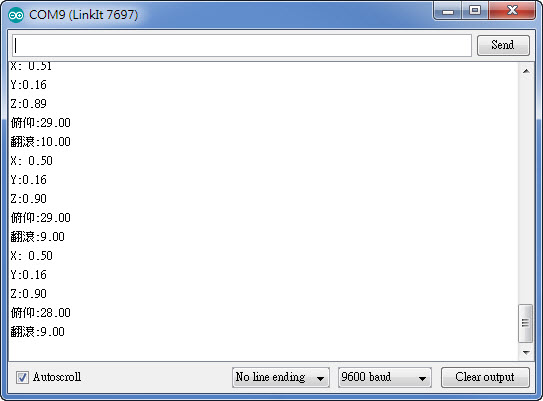
此為 LinkIt 7697 BlocklyDuino v3 新功能, 預計於七月初發佈
電路圖
LinkIt 7697
ADXL345 模塊
麵包板
杜邦線
使用 ADXL345 模組,搭配下面範例需連接以下腳位
VCC : 外接 5V 電源供應 (ADXL345 模組通常工作電壓為 3V~5V,所以也可使用 3V3 供應電源)
GND : 外接 GND
SDA :接到 P9 (LinkIt 7697 的 I2C-DATA 資料腳位)
SCL 或 SCK: 接到 P8 (LinkIt 7697 的 I2C-CLK 時序腳位)
積木畫布
產生的 Arduino 程式如下
#include <Wire.h>
#include <adxl345_blockly.h>
ADXL345Block adxl345;
void setup()
{
Serial.begin(9600);
adxl345.begin();
}
void loop()
{
Serial.print("X: ");
Serial.println(adxl345.getX());
Serial.print("Y:");
Serial.println(adxl345.getY());
Serial.print("Z:");
Serial.println(adxl345.getZ());
Serial.print("俯仰:");
Serial.println(adxl345.getPitch());
Serial.print("翻滾:");
Serial.println(adxl345.getRoll());
delay(500);
}
序列埠監控視窗三軸的加速度值,以及俯仰和翻滾的角度